Represents a generic task. More...
#include <GenericTask.hpp>
Public Member Functions | |
| GenericTask (std::string name, int task_dimension, int optim_vector_dimension) | |
| Construct a new GenericTask object. More... | |
| GenericTask (std::string name, int task_dimension, std::shared_ptr< Model::GenericModel > model_ptr) | |
| Construct a new Base Task object. More... | |
| std::string | getName () |
| Get the task name. More... | |
| void | resize (int input_size, int output_size) |
| Resize the \(E\) matrix and \(\boldsymbol{f}\) vector according to the task. More... | |
| void | setE (Eigen::MatrixXd E) |
| Set the \(E\) matrix in \( ||E\boldsymbol{x} - \boldsymbol{f}||^2_{SW}\). More... | |
| void | setf (Eigen::VectorXd f) |
| Set the \(f\) vector in \( ||E\boldsymbol{x} - \boldsymbol{f}||^2_{SW}\). More... | |
| virtual void | update (double dt) |
| Update \(E\) and \(\boldsymbol{f}\). overrided by the considered implementation of the task. More... | |
| Eigen::MatrixXd | getHessian () |
| Get the hessian matrix related to the task. More... | |
| Eigen::VectorXd | getGradient () |
| Get the gradient vector. More... | |
| void | setSelectionMatrix (Eigen::MatrixXd selection_matrix) |
| Set the task selection matrix. More... | |
| void | setWeightingMatrix (Eigen::MatrixXd weighting_matrix) |
| Set the task weighting matrix. More... | |
| Eigen::MatrixXd | getSelectionMatrix () |
| Get the selection matrix. More... | |
| Eigen::MatrixXd | getWeightingMatrix () |
| Get the weighting matrix. More... | |
| Eigen::MatrixXd | getJacobianGHC () |
| int | getTaskDimension () |
| void | setResolutionStrategy (ResolutionStrategy resolution_strategy) |
| void | setControledFrameName (std::string frame_name) |
| void | setReferenceFrame (ReferenceFrame reference_frame) |
| void | setSubStateMatrix (Eigen::MatrixXd &subStateMatrix) |
Protected Attributes | |
| std::shared_ptr< Model::GenericModel > | model_ptr_ |
| std::string | name_ |
| Eigen::MatrixXd | E_ |
| Eigen::VectorXd | f_ |
| Eigen::MatrixXd | selection_matrix_ |
| Eigen::MatrixXd | weighting_matrix_ |
| int | task_dimension_ |
| int | optim_vector_dimension_ |
| ResolutionStrategy | resolution_strategy_ |
| Eigen::MatrixXd | subStateMatrix_ |
| std::string | controled_frame_name_ |
| ReferenceFrame | reference_frame_ |
Detailed Description
Represents a generic task.
Let's consider a task using \(m\) degrees of freedom of a robot with \(n\) degrees of freedom. The optimization variable will be called \( \boldsymbol{x} \in \mathbb{R}^n \)
This task is expressed as \( ||E\boldsymbol{x} - \boldsymbol{f}||^2_{SW}\). where \(E \in \mathbb{R}^{m \times n}\) and \(\boldsymbol{f} \in \mathbb{R}^{m}\), \(S \in \mathbb{R}^{m \times m}\) is a selection matrix and \(W \in \mathbb{R}^{m \times m}\) is weighting matrix.
Constructor & Destructor Documentation
◆ GenericTask() [1/2]
|
inline |
Construct a new GenericTask object.
This constructor is used when creating a custom task The constructor resizes the problem and sets the selection and weighting matrices to the identity.
- Parameters
-
name The name of the task task_dimension The dimension of the task, \(m\) optim_vector_dimension The dimension of the optimization vector, \(n\)
◆ GenericTask() [2/2]
|
inline |
Construct a new Base Task object.
This constructor is used when creating an implemented task. It uses the model_ptr to automatically update the task. The constructor resizes the problem and set the selection and weighting matrices to the identity.
- Parameters
-
name The name of the task task_dimension The dimension of the task, \(m\) model_ptr a pointer toward the robot model
Member Function Documentation
◆ getGradient()
| auto Qontrol::Task::GenericTask::getGradient | ( | ) |
Get the gradient vector.
The gradient is computed as \( -2.0 E^T S W f \)
- Warning
- Strictly speaking the weighting matrix \(W\) used is the square root of the one given in setWeightingMatrix()
- Returns
- Eigen::VectorXd \(\in \mathbb{R}^{m} \)
◆ getHessian()
| auto Qontrol::Task::GenericTask::getHessian | ( | ) |
Get the hessian matrix related to the task.
The hessian is computed as \( 2.0 E^T S W E^t \)
- Warning
- Strictly speaking the weighting matrix \(W\) used is the square root of the one given in setWeightingMatrix()
- Returns
- Eigen::MatrixXd \(\in \mathbb{R}^{n \times n} \)
◆ getName()
| auto Qontrol::Task::GenericTask::getName | ( | ) |
Get the task name.
- Returns
- std::string
◆ getSelectionMatrix()
| auto Qontrol::Task::GenericTask::getSelectionMatrix | ( | ) |
Get the selection matrix.
- Returns
- Eigen::MatrixXd \(\in \mathbb{R}^{m \times m} \)
◆ getWeightingMatrix()
| auto Qontrol::Task::GenericTask::getWeightingMatrix | ( | ) |
Get the weighting matrix.
- Returns
- Eigen::MatrixXd \(\in \mathbb{R}^{m \times m} \)
◆ resize()
| void Qontrol::Task::GenericTask::resize | ( | int | input_size, |
| int | output_size | ||
| ) |
Resize the \(E\) matrix and \(\boldsymbol{f}\) vector according to the task.
- Parameters
-
input_size The task size, \(m\) output_size The optimization vector size, \(n\)
◆ setE()
| void Qontrol::Task::GenericTask::setE | ( | Eigen::MatrixXd | E | ) |
Set the \(E\) matrix in \( ||E\boldsymbol{x} - \boldsymbol{f}||^2_{SW}\).
- Parameters
-
E \(\in \mathbb{R}^{m \times n} \)
◆ setf()
| void Qontrol::Task::GenericTask::setf | ( | Eigen::VectorXd | f | ) |
Set the \(f\) vector in \( ||E\boldsymbol{x} - \boldsymbol{f}||^2_{SW}\).
- Parameters
-
f \(\in \mathbb{R}^{m} \)
◆ setSelectionMatrix()
| void Qontrol::Task::GenericTask::setSelectionMatrix | ( | Eigen::MatrixXd | selection_matrix | ) |
Set the task selection matrix.
- Parameters
-
selection_matrix \(\in \mathbb{R}^{m \times m} \)
◆ setWeightingMatrix()
| void Qontrol::Task::GenericTask::setWeightingMatrix | ( | Eigen::MatrixXd | weighting_matrix | ) |
Set the task weighting matrix.
- Parameters
-
weighting_matrix \(\in \mathbb{R}^{m \times m} \)
◆ update()
|
inlinevirtual |
Update \(E\) and \(\boldsymbol{f}\). overrided by the considered implementation of the task.
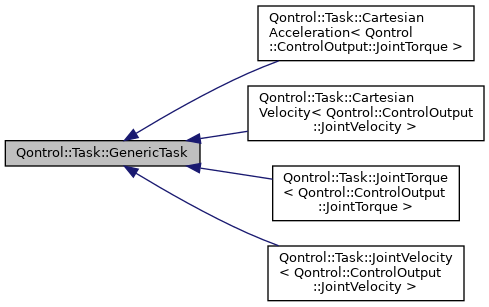
Reimplemented in Qontrol::Task::CartesianAcceleration< Qontrol::ControlOutput::JointTorque >, Qontrol::Task::CartesianVelocity< Qontrol::ControlOutput::JointVelocity >, Qontrol::Task::CartesianAcceleration< Qontrol::ControlOutput::JointAcceleration >, Qontrol::Task::JointAcceleration< Qontrol::ControlOutput::JointAcceleration >, Qontrol::Task::JointTorque< Qontrol::ControlOutput::JointTorque >, and Qontrol::Task::JointVelocity< Qontrol::ControlOutput::JointVelocity >.
The documentation for this class was generated from the following files:
- include/Qontrol/Tasks/GenericTask.hpp
- src/Tasks/GenericTask.cpp
